Sistem ulang-alik 4D untuk aplikasi beban berat
Penerangan
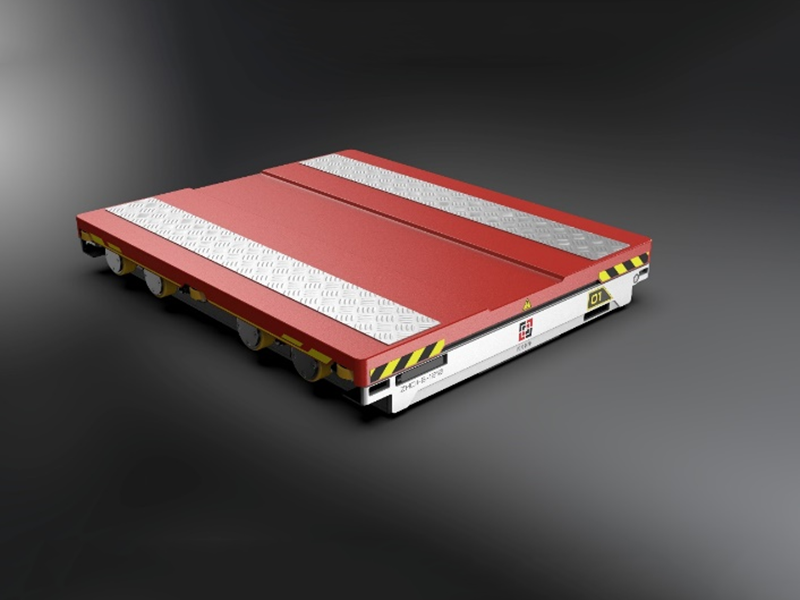
Sebagai peralatan teras sistem storan padat pintar, ulang-alik 4D terutamanya terdiri daripada gabungan bingkai, sistem elektrik, sistem bekalan kuasa, sistem pemanduan, sistem angkat, sistem penderia dan lain-lain.Ia mempunyai lima mod: alat kawalan jauh, manual, separa automatik, auto tempatan dan auto dalam talian. Ia dilengkapi dengan pelbagai perlindungan keselamatan dan amaran keselamatan, penggera keselamatan serantau, penggera keselamatan operasi dan penggera keselamatan interaktif. Selongsong disambungkan dengan kimpalan terlindung gas dan bolt berkekuatan tinggi. Gabungan rak menggunakan struktur dua lapisan. Penampilannya semuanya dicat semburan, dan bahagian yang dimesin serta pendakap elektrik disadur. Ia mempunyai dua set sistem pemanduan dan dua set sistem angkat. Sistem pemanduan bertanggungjawab ke atas arah XY. Salah satu sistem angkat bertanggungjawab untuk mengangkat kargo, dan satu lagi bertanggungjawab ke atas suis lorong primer dan sekunder. Arah ketinggian Z boleh merealisasikan perubahan lapisan ulang-alik 4D dengan menggunakan lif tersuai. Untuk merealisasikan fungsi akses ruang tiga dimensi.
Struktur jenis beban berat pada asasnya sama dengan versi standard. Perbezaan utama ialah kapasiti beban bertambah baik, dan kapasiti bawaan akan mencapai hampir dua kali ganda daripada versi standard. Reka bentuk galas beban mekanisme mengangkat diperkukuh, dan kuasa motor lifitng ditingkatkan untuk memastikan kapasiti galas beban boleh mencapai 2.5T. Kuasa motor kembara kekal tidak berubah. Untuk meningkatkan output, nisbah pengurangan dinaikkan, dan kelajuan larian ulang-alik 4D akan berkurangan yang sepadan.
perniagaan standard
Pemasangan dan penyimpanan resit di luar gudang
Penempatan semula dan pengecasan inventori menukar lapisan
Parameter Teknikal
| projek | Data asas | Teguran | |
| model | SX-ZHC-T-1210-2T | ||
| Dulang yang berkenaan | Lebar: 1200mm Kedalaman: 1000mm | ||
| Beban maksimum | Max 25 00kg | ||
| tinggi/berat | Ketinggian badan: 150mm, Berat ulang-alik: 350KG | ||
| Berjalan arah X utama | kelajuan | Tiada beban maksimum: 1.5 m/s, beban penuh maksimum: 1 .0m/s | |
| pecutan berjalan | ≤ 1.0m/S2 | ||
| motor | Motor Servo Tanpa Berus 48VDC 1 5 00W | Servo yang diimport | |
| pelayan Pemandu | Pemandu Servo Tanpa Berus | Servo yang diimport | |
| Berjalan ke arah Y | kelajuan | Tanpa beban maksimum: 1.0m/s, beban penuh maksimum: 0.8 m/s | |
| pecutan berjalan | ≤ 0.6m/S2 | ||
| motor | Motor Servo Tanpa Berus 48VDC 15 00W | Servo yang diimport | |
| pelayan Pemandu | Pemandu Servo Tanpa Berus | Servo yang diimport | |
| cargo jacking | Ketinggian menjejak | 30 mm _ | |
| motor | Motor tanpa berus 48VDC 75 0W | Servo yang diimport | |
| main jacking | Ketinggian menjejak | 35 mm | |
| motor | Motor tanpa berus 48VDC 75 0W | Servo yang diimport | |
| Saluran utama/kaedah kedudukan | Kedudukan berjalan: kedudukan kod bar / kedudukan laser | Jerman P+F/SAKIT | |
| Kaedah saluran / kedudukan sekunder | Kedudukan berjalan: fotoelektrik + pengekod | Jerman P+F/SAKIT | |
| Kedudukan dulang: laser + fotoelektrik | Jerman P+F/SAKIT | ||
| Sistem Kawalan | S7-1200 PLC Pengawal Boleh Aturcara | Jerman SIEMENS | |
| alat kawalan jauh | Kekerapan kerja 433MHZ, jarak komunikasi sekurang-kurangnya 100 meter | Import disesuaikan | |
| Bekalan kuasa | bateri litium | Kualiti tinggi domestik | |
| Parameter bateri | 48V, 30AH, masa penggunaan ≥ 6j, masa pengecasan 3j, masa boleh dicas semula: 1000 kali | Kapasiti mungkin berbeza bergantung pada saiz kenderaan | |
| kaedah kawalan kelajuan | Kawalan servo, tork malar kelajuan rendah | ||
| Kaedah kawalan palang | Penjadualan WCS, kawalan komputer sentuh, kawalan jauh | ||
| tahap bunyi operasi | ≤60db | ||
| Keperluan lukisan | Gabungan rak (hitam), penutup atas merah, aluminium depan dan belakang putih | ||
| suhu persekitaran | Suhu: 0℃~50℃ Kelembapan: 5% ~ 95% (tiada pemeluwapan) | ||


